OrientationSensor: populateMatrix() method
The populateMatrix method of the
OrientationSensor interface populates the given target matrix with the
rotation matrix based on the latest sensor reading. The rotation matrix is shown
below.
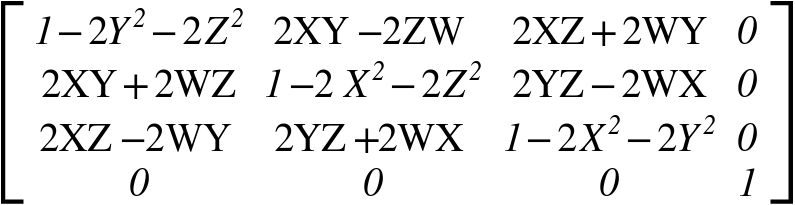
where:
- W = cos(θ/2)
- X = Vx * sin(θ/2)
- Y = Vy * sin(θ/2)
- Z = Vz * sin(θ/2)
Syntax
js
populateMatrix(targetMatrix)
Because OrientationSensor is a base class, populateMatrix
may only be read from one of its derived classes.
Parameters
targetMatrix-
TBD
Return value
None (undefined).
Examples
js
// TBD
Specifications
| Specification |
|---|
| Orientation Sensor # orientationsensor-populatematrix |
Browser compatibility
BCD tables only load in the browser